top of page


ECHO SOUNDING
As soon as geoinformation is required below the water surface, the echo sounder measurement comes into play. Regardless of whether it is a quarry pond or a large harbor basin, we offer the right solution according to your requirements. Products such as site plans with depth specifications or determinations of mass are exemplary final results for our customers.
Here are the advantages for you
We work with specialist companies who cover your specific requirements with their many years of specialist experience.
Lippe barrage Uentrop
Echo soundings of the Lippe to record the riverbed.

lip
Echo soundings of the Lippe to record the riverbed.

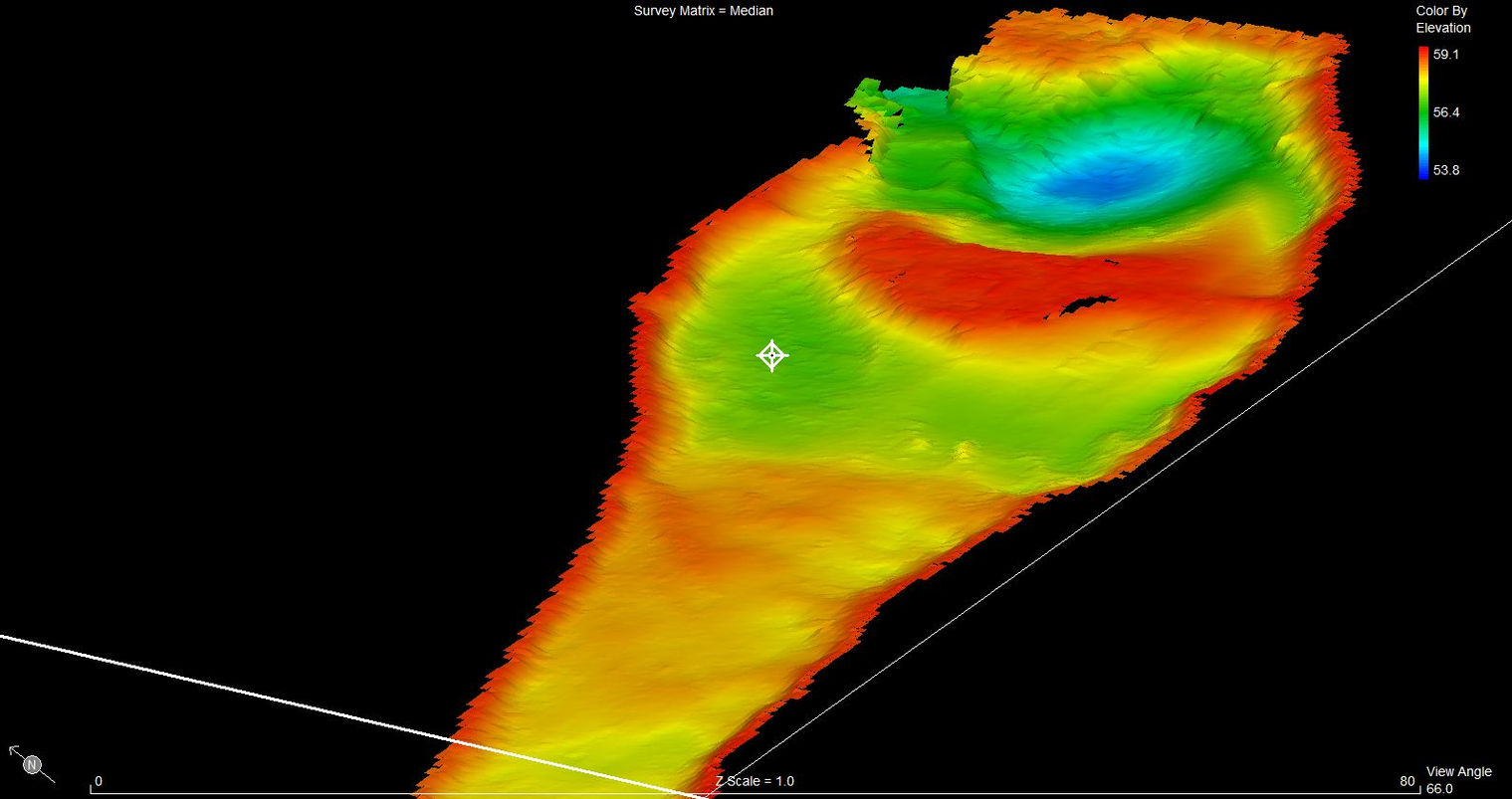
Echo sounding in the harbor basin
Echo sounding for debris detection and mass takeoff prior to dredging

multibeam echo sounder
The distance to the bottom is determined by means of sound waves via the transit time measurement. If this signal is sent out in different directions and the angle of emission is registered, one is able to scan the seabed extensively.
Lippe barrage Uentrop
Echo soundings of the Lippe to record the riverbed.
lip
Echo soundings of the Lippe to record the riverbed.
Echo sounding in the harbor basin
Echo sounding for debris detection and mass takeoff prior to dredging
multibeam echo sounder
The distance to the bottom is determined by means of sound waves via the transit time measurement. If this signal is sent out in different directions and the angle of emission is registered, one is able to scan the seabed extensively.
Lippe barrage Uentrop
Echo soundings of the Lippe to record the riverbed.
lip
Echo soundings of the Lippe to record the riverbed.
Echo sounding in the harbor basin
Echo sounding for debris detection and mass takeoff prior to dredging
multibeam echo sounder
The distance to the bottom is determined by means of sound waves via the transit time measurement. If this signal is sent out in different directions and the angle of emission is registered, one is able to scan the seabed extensively.
Lippe barrage Uentrop
Echo soundings of the Lippe to record the riverbed.
lip
Echo soundings of the Lippe to record the riverbed.
Echo sounding in the harbor basin
Echo sounding for debris detection and mass takeoff prior to dredging
multibeam echo sounder
The distance to the bottom is determined by means of sound waves via the transit time measurement. If this signal is sent out in different directions and the angle of emission is registered, one is able to scan the seabed extensively.
Lippe barrage Uentrop
Echo soundings of the Lippe to record the riverbed.
lip
Echo soundings of the Lippe to record the riverbed.
Echo sounding in the harbor basin
Echo sounding for debris detection and mass takeoff prior to dredging
multibeam echo sounder
The distance to the bottom is determined by means of sound waves via the transit time measurement. If this signal is sent out in different directions and the angle of emission is registered, one is able to scan the seabed extensively.
Lippe barrage Uentrop
Echo soundings of the Lippe to record the riverbed.
lip
Echo soundings of the Lippe to record the riverbed.
Echo sounding in the harbor basin
Echo sounding for debris detection and mass takeoff prior to dredging
multibeam echo sounder
The distance to the bottom is determined by means of sound waves via the transit time measurement. If this signal is sent out in different directions and the angle of emission is registered, one is able to scan the seabed extensively.
Lippe barrage Uentrop
Echo soundings of the Lippe to record the riverbed.
lip
Echo soundings of the Lippe to record the riverbed.
Echo sounding in the harbor basin
Echo sounding for debris detection and mass takeoff prior to dredging
multibeam echo sounder
The distance to the bottom is determined by means of sound waves via the transit time measurement. If this signal is sent out in different directions and the angle of emission is registered, one is able to scan the seabed extensively.
Lippe barrage Uentrop
Echo soundings of the Lippe to record the riverbed.
lip
Echo soundings of the Lippe to record the riverbed.
Echo sounding in the harbor basin
Echo sounding for debris detection and mass takeoff prior to dredging
multibeam echo sounder
The distance to the bottom is determined by means of sound waves via the transit time measurement. If this signal is sent out in different directions and the angle of emission is registered, one is able to scan the seabed extensively.
1/4
bottom of page